{kind=link}
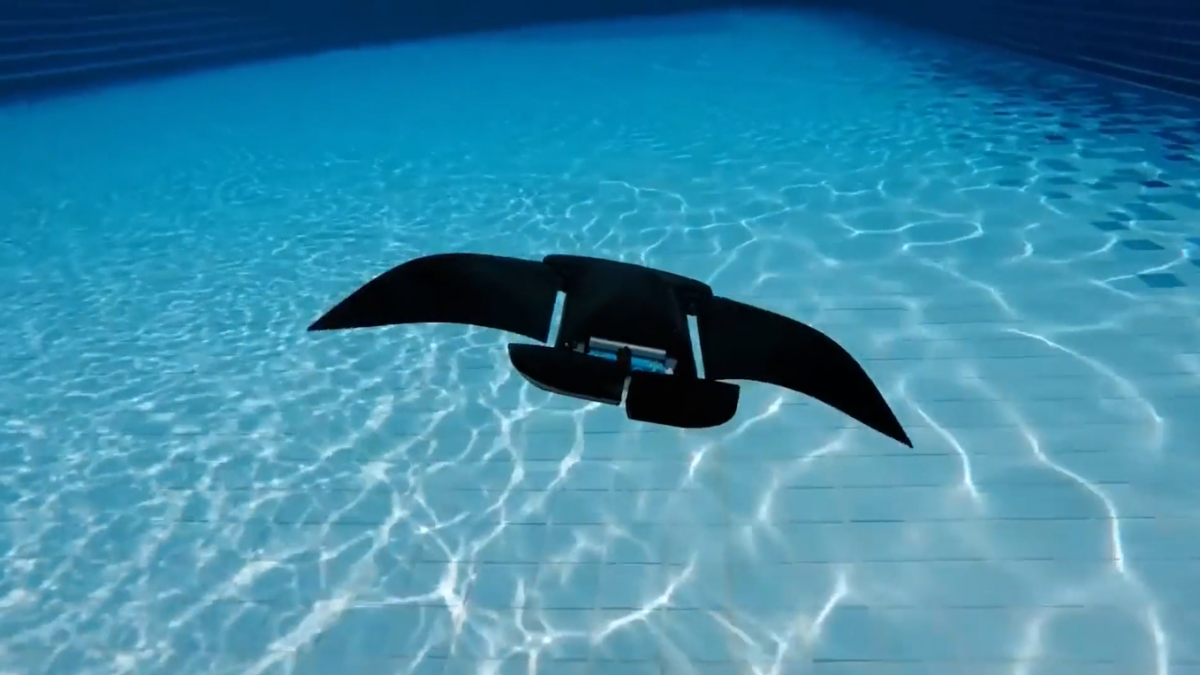
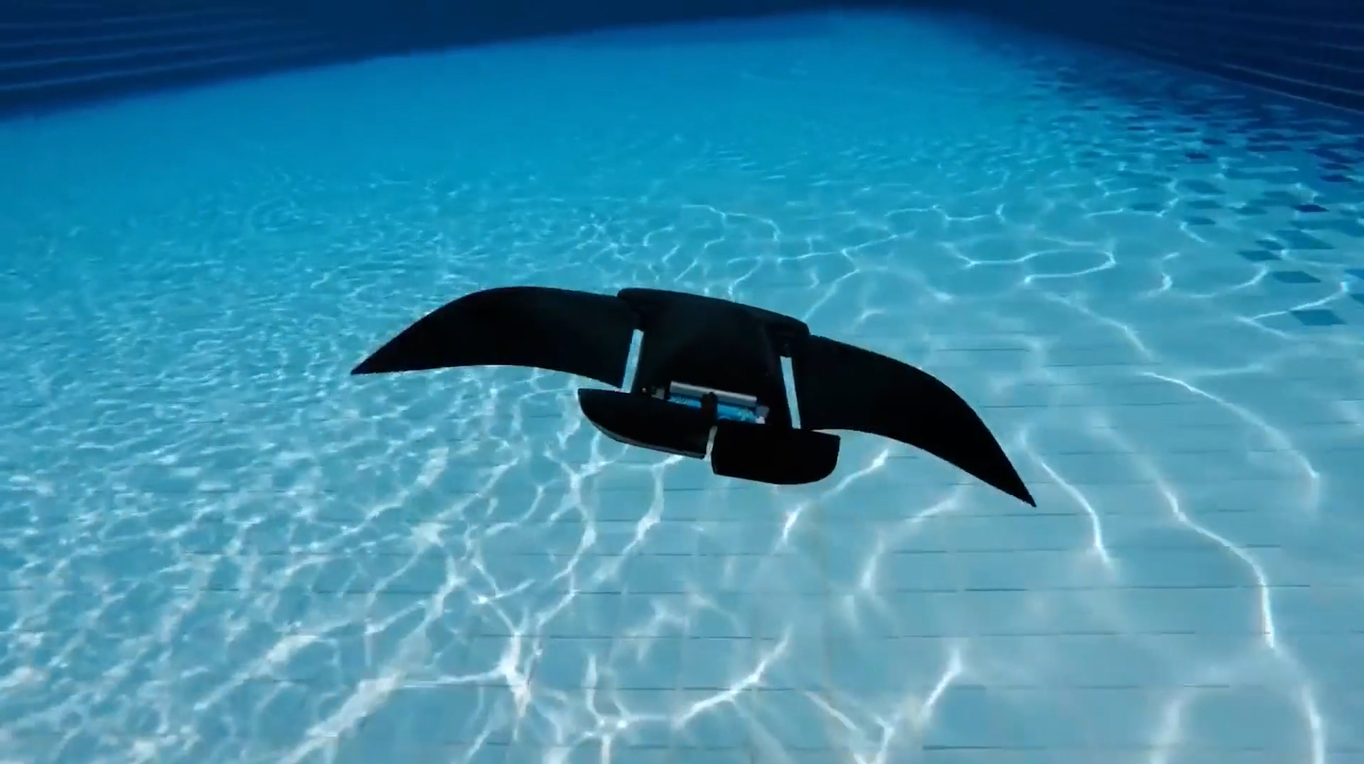
Naukowcy z Singapuru zbudowali podwodnego robota, który wygląda i pływa jak manta (płaszczka). Na każdą z płetw przypada pojedynczy motor, aby poruszał się w wodzie z doskonałością porównywalną do jego biologicznego kuzyna.
Nie jest to pierwszy tego typu wynalazek. Uczeni od lat pracują nad imitowaniem ruchu podobnego do tego, wykonywanego przez płetwy piersiowe płaszczki. Według zapewnień Chew Chee Meng z National University of Singapore, jest to pierwszy robot podwodny, który używa pojedynczego motoru na każdą z płetw. Cały system jest zależny od wzajemnego oddziaływania na siebie cieczy i elementów konstrukcji.
Manta, znana jako jeden z najefektywniejszych pływaków, od długiego czasu fascynowała naukowców swoją unikatową metodą poruszania się w wodzie. Nawet przy wzburzonym morzu, używając swoich płetw piersiowych, bez wysiłku potrafi odpychać wodę do tyłu. Jak mówi Keth Moored, asystent profesora od Mechaniki Inżynieryjnej na Lehigh University w Pensylwani, badania nad lokomocyjnymi ruchami organizmów trwają już przez około 30 lat. Jednak wciąż pozostaje wiele do zrobienia, jeśli chodzi o zrozumienie przepływu cieczy wokół zrobotyzowanych płetw i interakcji między cieczą a strukturą tych giętkich płetw, takich jak u robota Chew’a – dodaje Moored.
Konstrukcja
Konstrukcja MantaDroid’a wykonana jest z polimeru syntetycznego (polichlorek winylu, PCW), do którego dołączone są płetwy oraz dwa tylne stery, które poruszają się w wodzie jak u płaszczki. Chew powiedział, że pasywna elastyczność płetw pozwala naturalnie wchodzić w interakcje z wodą, rozwijając prędkość siedmiu dziesiątych metra na sekundę.

Okazało się, że dzięki pasywnej płetwie, stworzonej z pojedynczej warstwy PCW, interakcja robota z otoczeniem jest dużo naturalniejsza i efektywniejsza, niż przy użyciu skomplikowanych połączeń i mechanizmów do jej budowy. Co za tym idzie, „nie walczysz z hydrodynamiką tego systemu” – powiedział prof. Chew. Singapurski zespół przejrzał ponad 40 różnych projektów przez okres dwóch lat, zanim zdecydował się zbudować elastyczny model płetw z PCW.
Przyszłość tego projektu
MantaDroid może pływać aż do 10 godzin. Chew i jego zespół z uniwersyteckiego oddziały inżynierii planują przeprowadzić testy na otwartym morzu i chcą dodać więcej trybów ruchu do mechanizmu płetw. Powiedział również, że trwają prace nad konstrukcją dwa razy większą od oryginalnego MantaDroid’a. Uważają, że takie roboty będą użyteczne w badaniach nad zróżnicowaniem organizmów morskich, zbieraniu danych hydrograficznych oraz w podwodnych poszukiwaniach.
MantaDroid jest częścią wciąż rozwijającej się dziedziny biomimetyki, która używa wiedzy o systemach naturalnych i robotach, aby tworzyć nowe pojazdy, powiedział Thomas Atwood, dyrektor wykonawczy US National Robotics Education Foundation. Roboty takie jak ten, powiedział, będą używane do przeprowadzenia operacji wojskowych, ale również pomogą w mapowaniu podwodnym czy też badaniu dna oceanicznego.